Kapitán Spiccato a Major Espressivo: Rozdiel medzi revíziami
Skočit na navigaci
Skočit na vyhledávání
dBez shrnutí editace |
Bez shrnutí editace |
||
| Riadok 2: | Riadok 2: | ||
<youtube>p0HyWTKbrlw</youtube> | <youtube>p0HyWTKbrlw</youtube> | ||
Arduino a displej 8x8: | |||
rozsvietenie rámčeka: | |||
<syntaxhighlight lang="c++"> | |||
#include "MaxLedControl.h" | |||
LedControl lc=LedControl(11,13,7,1); | |||
void setup() { | |||
lc.shutdown(0,false); | |||
lc.setIntensity(0,8); | |||
lc.clearDisplay(0); | |||
} | |||
void loop() { | |||
int r, c, stav; | |||
for (stav = 1; stav >= 0; stav--) | |||
{ | |||
for (r = 0; r < 8; r++) | |||
{ | |||
lc.setLed(0,r,0,stav); | |||
delay(300); | |||
} | |||
for (c = 1; c < 8; c++) | |||
{ | |||
lc.setLed(0,7,c,stav); | |||
delay(300); | |||
} | |||
for (r = 6; r >= 0; r--) | |||
{ | |||
lc.setLed(0,r,7,stav); | |||
delay(300); | |||
} | |||
for (c = 6; c > 0; c--) | |||
{ | |||
lc.setLed(0,0,c,stav); | |||
delay(300); | |||
} | |||
} | |||
} | |||
</syntaxhighlight> | |||
Riadenie LED pomocou joysticku: | |||
[[Image:displej_arduino.jpg|600px]] | |||
<syntaxhighlight lang="c++"> | |||
#include "MaxLedControl.h" | |||
LedControl lc=LedControl(11,13,7,1); | |||
int x = 3; | |||
int y = 3; | |||
void setup() { | |||
Serial.begin(9600); | |||
lc.shutdown(0,false); | |||
lc.setIntensity(0,8); | |||
lc.clearDisplay(0); | |||
pinMode(5, OUTPUT); | |||
digitalWrite(5, 1); | |||
lc.setLed(0,x,y,1); | |||
} | |||
void loop() { | |||
if (digitalRead(14)) | |||
{ | |||
Serial.println("click"); | |||
} | |||
int osx = analogRead(1); | |||
int osy = analogRead(2); | |||
Serial.print(osx); | |||
Serial.print(" "); | |||
Serial.println(osy); | |||
if ((osx < 400) && (x > 0)) | |||
{ | |||
lc.setLed(0,x,y,0); | |||
x--; | |||
lc.setLed(0,x,y,1); | |||
delay(500); | |||
} | |||
if ((osx > 630) && (x < 7)) | |||
{ | |||
lc.setLed(0,x,y,0); | |||
x++; | |||
lc.setLed(0,x,y,1); | |||
delay(500); | |||
} | |||
if ((osy < 400) && (y > 0)) | |||
{ | |||
lc.setLed(0,x,y,0); | |||
y--; | |||
lc.setLed(0,x,y,1); | |||
delay(500); | |||
} | |||
if ((osy > 630) && (y < 7)) | |||
{ | |||
lc.setLed(0,x,y,0); | |||
y++; | |||
lc.setLed(0,x,y,1); | |||
delay(500); | |||
} | |||
} | |||
</syntaxhighlight> | |||
<youtube></youtube> | |||
Prvé misie: | |||
[[Media:prve_misie.png]] | |||
[[Media:prve_misie.zip|prve_misie.zip]] | |||
Verzia z 17:45, 15. november 2024

Arduino a displej 8x8:
rozsvietenie rámčeka:
#include "MaxLedControl.h"
LedControl lc=LedControl(11,13,7,1);
void setup() {
lc.shutdown(0,false);
lc.setIntensity(0,8);
lc.clearDisplay(0);
}
void loop() {
int r, c, stav;
for (stav = 1; stav >= 0; stav--)
{
for (r = 0; r < 8; r++)
{
lc.setLed(0,r,0,stav);
delay(300);
}
for (c = 1; c < 8; c++)
{
lc.setLed(0,7,c,stav);
delay(300);
}
for (r = 6; r >= 0; r--)
{
lc.setLed(0,r,7,stav);
delay(300);
}
for (c = 6; c > 0; c--)
{
lc.setLed(0,0,c,stav);
delay(300);
}
}
}
Riadenie LED pomocou joysticku:

#include "MaxLedControl.h"
LedControl lc=LedControl(11,13,7,1);
int x = 3;
int y = 3;
void setup() {
Serial.begin(9600);
lc.shutdown(0,false);
lc.setIntensity(0,8);
lc.clearDisplay(0);
pinMode(5, OUTPUT);
digitalWrite(5, 1);
lc.setLed(0,x,y,1);
}
void loop() {
if (digitalRead(14))
{
Serial.println("click");
}
int osx = analogRead(1);
int osy = analogRead(2);
Serial.print(osx);
Serial.print(" ");
Serial.println(osy);
if ((osx < 400) && (x > 0))
{
lc.setLed(0,x,y,0);
x--;
lc.setLed(0,x,y,1);
delay(500);
}
if ((osx > 630) && (x < 7))
{
lc.setLed(0,x,y,0);
x++;
lc.setLed(0,x,y,1);
delay(500);
}
if ((osy < 400) && (y > 0))
{
lc.setLed(0,x,y,0);
y--;
lc.setLed(0,x,y,1);
delay(500);
}
if ((osy > 630) && (y < 7))
{
lc.setLed(0,x,y,0);
y++;
lc.setLed(0,x,y,1);
delay(500);
}
}
'"`UNIQ--youtube-00000005-QINU`"'
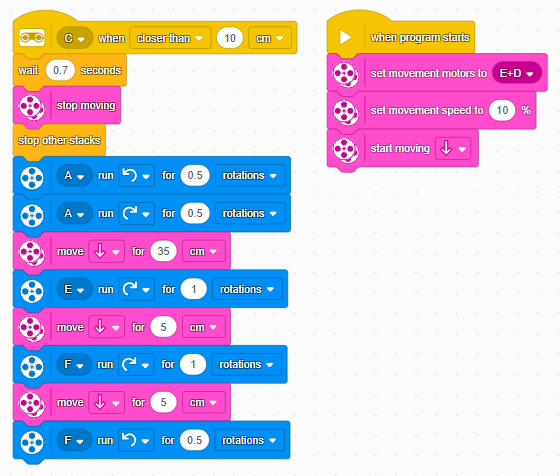
Prvé misie:
{kind=link}