Arduino: Rozdiel medzi revíziami
Skočit na navigaci
Skočit na vyhledávání
Bez shrnutí editace |
dBez shrnutí editace |
||
| (10 medziľahlých úprav od 2 ďalších používateľov nie je zobrazených) | |||
| Riadok 1: | Riadok 1: | ||
<div style="background-color:#FAFFDA;"> | <div style="background-color:#FAFFDA;"> | ||
rýchly odkaz: [[Programy pre Arduino|programy]] | |||
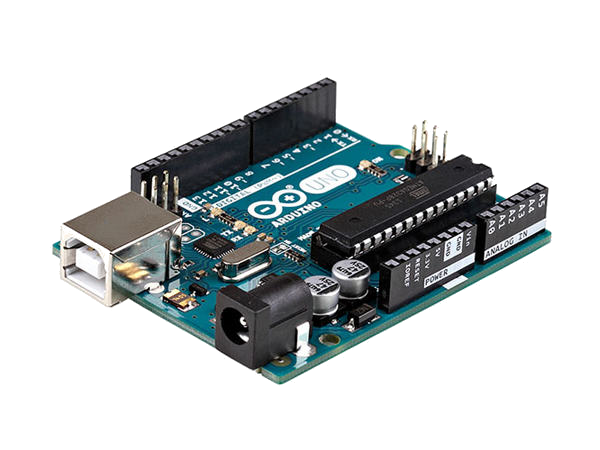
[[Image:arduino_uno.png|right|Arduino Uno]] | |||
Slovo Arduino označuje niekoľko vecí: | Slovo Arduino označuje niekoľko vecí: | ||
* je to počítač (malá doska plošného spoja osadená väčšinou jednočipovým mikropočítačom Atmel AVR ATMega328) | * je to počítač (malá doska plošného spoja osadená väčšinou jednočipovým mikropočítačom Atmel AVR ATMega328) | ||
| Riadok 6: | Riadok 9: | ||
* sú to všetky tieto veci dokopy. | * sú to všetky tieto veci dokopy. | ||
Arduino sa vyrába v rozličných verziách. | Arduino sa vyrába v rozličných verziách. Vpravo je Arduino Uno, a my budeme používať Arduino Nano - funguje rovnako ako Uno, ale je oveľa menšie a teda praktickejšie: | ||
[[Image:arduino_nano.png|Arduino Nano|300px]]<br> | |||
Mali sme od združenia Robotika.SK na krúžku požičané aj roboty Acrob - používajú dosku, ktorá sa podobá na Arduino a funguje rovnako. Všetko, čo sme s nimi robili, sme zapísali na samostatnú stránku [[Acrob]]. | |||
[[Image: | [[Image:robot_acrob.jpg|Robot Acrob|200px]]<br> | ||
Základom Arduina je jednočipový mikropočítač ATMega328: | |||
[[Image: | [[Image:atmega328.png|ATMega328|250px]]<br> | ||
Funkcie jednotlivých vývodov jednočipového mikropočítača ATMega328 sú takéto: | |||
[[Image:atmega328_pinout.png|ATMega328 pinout]]<br> | [[Image:atmega328_pinout.png|ATMega328 pinout]]<br> | ||
Podrobné informácie o jednočipovom mikropočítači ATMega328 sa dajú nájsť v jeho [[Media:atmega328datasheet.pdf|datasheete]]. | Podrobné informácie o jednočipovom mikropočítači ATMega328 sa dajú nájsť v jeho [[Media:atmega328datasheet.pdf|datasheete]]. | ||
Pre nás je ale podstatné, ako sú piny ATMega328 pripojené na vývody Arduina: | |||
Pre | |||
[[Image:arduino_nano_pinout.png|Arduino NANO pinout|900px]]<br> | |||
< | |||
Aktuálna revízia z 09:52, 18. december 2019
rýchly odkaz: programy

Slovo Arduino označuje niekoľko vecí:
- je to počítač (malá doska plošného spoja osadená väčšinou jednočipovým mikropočítačom Atmel AVR ATMega328)
- je to programovací jazyk v ktorom sa tento počítač dá programovať
- je to program - programovacie vývojové prostredie, pomocou ktorého sa program zapisuje a zároveň cez USB kábel prenáša a spúšťa na Arduine
- sú to všetky tieto veci dokopy.
Arduino sa vyrába v rozličných verziách. Vpravo je Arduino Uno, a my budeme používať Arduino Nano - funguje rovnako ako Uno, ale je oveľa menšie a teda praktickejšie:

Mali sme od združenia Robotika.SK na krúžku požičané aj roboty Acrob - používajú dosku, ktorá sa podobá na Arduino a funguje rovnako. Všetko, čo sme s nimi robili, sme zapísali na samostatnú stránku Acrob.

Základom Arduina je jednočipový mikropočítač ATMega328:

Funkcie jednotlivých vývodov jednočipového mikropočítača ATMega328 sú takéto:

Podrobné informácie o jednočipovom mikropočítači ATMega328 sa dajú nájsť v jeho datasheete.
Pre nás je ale podstatné, ako sú piny ATMega328 pripojené na vývody Arduina:
