Denníček - október 2016: Rozdiel medzi revíziami
(rozdelenie denníka podľa mesiacov: október) |
dBez shrnutí editace |
||
| (4 medziľahlé úpravy od rovnakého používateľa nie sú zobrazené.) | |||
| Riadok 221: | Riadok 221: | ||
Potrebujeme namontovať ďalšie senzory, aby bolo možné jazdiť čo najpresnejšie po čiare. | Potrebujeme namontovať ďalšie senzory, aby bolo možné jazdiť čo najpresnejšie po čiare. | ||
</div><div style="background-color: #EEFFEE;"> | </div> | ||
<div style="background-color: #EEFFEE;"> | |||
''25.10. utorok:''<br> | ''25.10. utorok:''<br> | ||
Strategická porada. Nový model robota, alebo zostávame pri tomto? ---> Zostávame.<br> | |||
Odstrelovací mechanizmus: ešte nevieme, ako presne bude vyzerať na konci robot ---> odkladáme na neskôr.<br> | Odstrelovací mechanizmus: ešte nevieme, ako presne bude vyzerať na konci robot ---> odkladáme na neskôr.<br> | ||
Dôkladne sme prediskutovali úlohy ---> vznikol nový plán jázd, stránka [[Jazdy]] je aktualizovaná.<br> | Dôkladne sme prediskutovali úlohy ---> vznikol nový plán jázd, stránka [[Jazdy]] je aktualizovaná.<br> | ||
Aktuálna revízia z 17:45, 20. december 2016
4.10. utorok:
Ružový panter rozobral hlavného robota :-D.
naštastie :-) sme ho zavčasu zastavili, ale bol dosť šikovný, aby ho znovu poskladal.
Nebránime sa dobrým nápadom a novým myšlienkam, robot zatiaľ nie je dokonalý a určite sa dá zlepšovať, ale treba dať pozor, aby sme sa na tom dohodli ako celý tím. Nezávislá iniciatíva, ktorá pomení výledok niekoľkých hodín práce ostatných, ktorí sa k tomu nemôžu vyjadriť - tomu sa určite chceme vyvarovať!
Dnes sa nám podarilo:




- zistili sme, že dávkovač krmiva, ktorý Žralok minule poskladal potrebuje zarážku, aby posuvník nevybehol do polohy, kde ho už ozubené koliesko nezachytí - na druhý pokus sme zarážku umiestnili dobre a dávkovač už dávkoval spoľahlivo.
- ale - keďže asi bude namontovaný na robotovi vysoko, vysypané krmivo odskakuje ďaleko z kruhovej oblasti zvieraťa, preto Mrož poskladal dávkovaciu rúru, cez ktorú sa krmivo vysype až na zem a neodskakuje
- dotiahli sme mechaniku konštrukcie na transport žraloka - bolo treba vymeniť strany (robot musí ísť kolesami napred cez slepecký plot) a vďaka tomu je rameno uchytené na takom mieste, že stačí otočiť len jedným kolesom a robot sa z neho vyvlečie, zdá sa, že to funguje spoľahlivo. ostáva vytvoriť program - ale to sa musíme najskôr naučiť pohybovať opatrne
- Žralok rozrobil prvú verziu nadstavca na vykladanie zvierat na mechanizmus výmeny zvierat...
- naprogramovali sme náš prvý blok so vstupnými parametrami: blok na opatrné rozbiehanie sa, ktorý postupne zvyšuje rýchlosť. Má dva parametre: 1) celkovú vzdialenosť na ktorej má zrýchliť z nulovej až do výslednej rýchlosti a 2) výslednú rýchlosť na ktorú má zrýchliť
- na tento blok by mali nadväzovať blok na pohyb stálou rýchlosťou a opačný blok - ktorý bude postupne spomaľovať.
- celkom na konci sme zistili, že blok má jeden problém - prečítaj si na obrázku dole - nabudúce ho skúsime vyriešiť.

Download: opatrnost.zip
- diskutovali sme o tom, že pri zbieraní úrody na poliach kombajnami sa stáva, že kombajn pokosí aj mladú srnku, zajaca, alebo iné zvieratá - rozmýšľali sme nad quadkoptérou, ktorá by letela pred kombajnom a kontrolovala pole pohľadom priamo zhora, prípadne nad ramenom, ktoré by sa počas kosenia vysunulo a plnilo by rovnakú funkciu. Zamýšľali sme sa nad tým, či nejake iné senzory by dokázali zistiť, či sa v poli nachádzajú nejaké zvieratá...
6.10. stvrtok:
- Palo tu s nami bol len chvílu )-: //Paľo: lebo prišiel Matej, ktorý sa vám venoval, teda dúfam :-)
- Prijali sme 2 nových žiakov // no len či prídu obaja znovu :-)
- do 999/1000 sme dorobili zrýchľovanie (-: // tak na to sa ešte pozrieme
11.10. utorok:
Dnes sa pracovalo, ale neviem, neviem, koľko užitočného sa urobilo... ale snáď aspoň niečo. V každom prípade treba výmyšľať a skúšať nové nápady a aj keď nevýjdu, tak sa na tom vždy niečo naučíme.
- Krotiteľ poskladal krabičku pre zachytenie krmiva, ktoré sa vysype z dávkovača krmiva a bude ho treba k dávkovaču doviezť asi v prvej jazde.
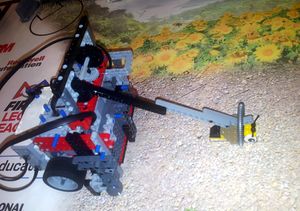
- Žralok sa pokúsil zostrojiť systém na vykladanie zvierat na otočnú platformu, ktorý by fungoval bez motora na princípe zošmyknutia sa prevážaného zvieraťa. Problémik je v tom :-), že zvieratko takto väčšinou zakopne a prevalí sa ďalej až spadne - pozri obrázok - obzvlášť netopier sa takto rád správa, keďže jeho stabilita kvôli hojdajúcemu sa netopierovi na konári nie je veľká...
- Tiger s Panterom sa pustili do prestavovania automatickej pušky na odstreľovací mechanizmus na koláče, aby sme ich zo základne všetky mohli rýchlo odstreliť do výskumnej a tréningovej oblasti (štvorec za zelenou rampou). Vyskúšali, že motor by aj mohol mať silu na odstrelenie koláčov, ale plochu treba dať dolu na stôl, prípadne ju dať celkom preč, aby sa koláče mohli kĺzať priamo po povrchu ihriska a nechať tam iba odstreľovací prevod pripojiteľný na motor - tam bude treba hlavne vymyslieť, ako pripojiť tento mechanizmus na niektorý z motorov robota... napríklad namiesto jedného z jeho kolies?
- Mrož veľmi usilovne budoval dávkovač koláčov, ktorý na jednu stranu vyhadzuje oddeľovacie prepážky a na druhú stranu koláče. Je však otázka, či tento mechanizmus bude treba. Ak sa budú koláče kĺzať priamo po povrchu ihriska, tak ich pred robota obsluhujúci technici počas hry môžu položiť priamo rukou aj počas práce robota - len sa nesmú dotknúť ničoho, čo je s robotom pevne spojené!
- Maťo - ktoré si zviera? :-) sa učil programovať robota, ktorý jazdí po čiare a vcelku sa mu to podarilo!
- A Krotiteľ pracoval na bloku na postupné zrýchľovanie. Vymyslel novú verziu, kde robot každú desatinku sekundy zvýši rýchlosť o 1 - takže by sa už nemalo stávať, že na začiatku mu trvá dlho, kým prejde prvý úsek, zatiaľ čo posledný úsek prefičí za veľmi krátky čas. Keď robot dosiahol maximálnu rýchlosť alebo došiel do požadovanej vzdialenosti, tak cyklus skončil. A tu je práve ten problém - v tom slovíčku ALEBO. My by sme potrebovali, aby vždy došiel do požadovanej vzdialenosti a okrem toho aby na konci mal požadovanú rýchlosť, pričom sa k nej dopracuje postupne... Takže musíme ísť na to ešte raz. Rozmýšľali sme nad problémom spoločne a prišli sme na toto:
Z matematiky vieme (Žralok vysypal vzorec z rukáva), že súčet prvých N po sebe idúcich čísel je rovný 1 + 2 + 3 + ... + n = n * (n + 1) / 2. Napríklad:
1 + 2 + 3 = 6 = 3 * 4 / 2 1 + 2 + 3 + 4 = 10 = 4 * 5 / 2 1 + 2 + 3 + 4 + 5 = 15 = 5 * 6 / 2 ...
Žralok hneď aj vysvetlil prečo to tak je - lebo môžeme dať vždy do dvojíc postupne čísla, ktoré odoberáme zľava a čísla, ktoré odoberáme zprava a dostávame vždy súčet n + 1: Napr. pre
1 + 2 + 3 + 4 + 5 + 6, čiže n = 6, vytvárame dvojice:
1 + 6 = 7 = (6 + 1) = (n + 1) 2 + 5 = 7 = (6 + 1) = (n + 1) 3 + 4 = 7 = (6 + 1) = (n + 1)
a keďže naraz odoberáme z oboch strán, tak takýchto dvojíc vytvoríme polovičný počet oproti pôvodnému počtu čísel, čiže n / 2. Celkovo teda môžeme vypočítať súčet 1 + 2 + 3 + 4 + 5 + 6 tak, že posčitujeme namiesto pôvodných n čísel, tých n/2 dvojíc. Každá dvojica má súčet n + 1 a je ich n / 2, takže súčet je (n + 1) * n / 2. (keby to niekoho veľmi zaujímalo - sedí to aj pre nepárne n, lebo ten stredný, čo ostane je práve = (n + 1) / 2 a dvojíc je pre nepárny prípad len n / 2 - 1/2.)
Ako tento vzorec súvisí s našim problémom postupného zrýchľovania?
chceli by sme, aby sa robot pohyboval postupne zvyšujúcou sa rýchlosťou a na konci dosiahol rýchlosť v. Prvý úsek prejde desatinovou rýchlosťou v/10, druhý úsek dvojdesatinovou 2 * v/10 atď až posledný úsek prejde desaťdesatinovou rýchlosťou 10 * v/10, čiže výslednou rýchlosťou v. Lenže my by sme chceli, aby týmito rýchlosťami išiel postupne vždy rovnako dlho = rovnaký čas a nie rovnakú dráhu, ako sme naprogramovali minule. Z fyziky niektorí už vieme, ako súvisia dráha, čas a rýchlosť:
s = v * t s - dráha v - rýchlosť t - čas
celkový súčet jednotlivých dráh pre všetkých 10 úsekov by mal dávať celú dráhu, ktorú robot má prejsť:
s = s1 + s1 + ... + s10
kde
s1 - je dráha akú prejde robot v prvom úseku rýchlosťou v / 10 s2 - je dráha akú prejde robot v druhom úseku rýchlosťou 2 * v / 10 ... s10 - je dráha akú prejde robot v poslednom úseku rýchlosťou 10 * v / 10
každý úsek má prejsť za rovnaký čas, označme ho t1.
Takže pre jednotlivé úseky platí:
s1 = v / 10 * t1 s2 = 2 * v / 10 * t1 s3 = 3 * v / 10 * t1 ... s10 = 10 * v / 10 * t1
keď ich posčitujeme, dostaneme
s = v / 10 * t1 + 2 * v / 10 * t1 + 3 * v / 10 * t1 + ... + 10 * v / 10 * t1 s = v / 10 * t1 * (1 + 2 + 3 + ... + 10) s = v / 10 * t1 * (10 * 11 / 2) = v * t1 * 11 / 2
čiže
t1 = s / v * 2 / 11
a potom
s1 = v / 10 * t1 = s * 1 / 55 s2 = 2 * v / 10 * t1 = s * 2 / 55 s3 = 3 * v / 10 * t1 = s * 3 / 55 ... s10 = 10 * v / 10 * t = s * 10 / 55
a teraz už iba zostáva ten pôvodný program upraviť! :-) teda tak, aby dĺžka prejdených úsekov nebola rovnaká ako v pôvodnom programe, ale sa postupne menila tak, ako je to vypočítané v týchto vzorcoch.
Dnešné obrázky:







13.10. štvrtok:
Maťo sa trápil so sledovaním čiary pomocou dvoch senzorov, ale pomohol mu Mišo a tu je výsledok:

takýto program vytvoril, nabudúceho ho môžeme ešte trochu zjednodušiť:
Download: ciara_dva_senzory.zip
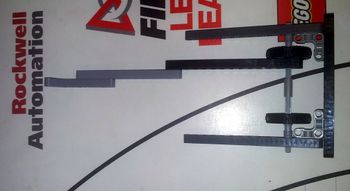
Mrož sa venoval okrem iného aj hľadaniu vhodného riešenia mechanizmu na odstreľovanie koláčov, takto vyzerá výsledok:

Potrebovali by sme to vidieť v pohybe pripojené na motor, ktorý riadi program. Možno trochu väčšiu silu by mohol mať mechanizmus, na ktorom robí Tiger, aj keď zatiaľ je to iba prvý nedokončený prototyp, ktorý bude tiež treba vyskúšať a asi trochu vylepšiť:

Krotiteľ a Žralok bádali nad úpravou programu z predchádzajúceho týždňa, aby bolo zrýchľovanie plynulé s dostatočne rýchle. Najskôr pokračovali v celkom novom bloku, ktorý začali pred týždňom vo štvrtok, ale ukázalo sa, že potrebné zmeny pôvodného bloku, ktorý zrýchloval o desatinu cieľovej rýchlosti postupne po každom rovnako dlhom desatinovom úseku boli len malé: stačilo začať s úsekom dĺžky 1/55 celkovej dráhy a postupne po každom zvýšení rýchlosti o desatinu pridať k dĺžke nasledujúceho úseku ďalšiu 1/55. Čiže jednotlivé úseky s1, s2, ..., s10 takto budú:
1/55 * s, 2/55 * s, ..., 10/55 * s
ked sa totiž sčítajú čísla 1 + 2 + ... + 10 tak vyjde presne 55, čiže keď sa sčíta 1/55 * s + 2/55 * s + ... + 10/55 * s, tak vyjde presne s.
Tu je výsledný zrýchľovací blok:

podľa neho sa už ľahko dá vytvoriť spomaľovanie - začíname na plnej rýchlosti, ktorú 10-krát znížime o 1/10 rýchlosti, dĺžka úsekov bude postupne klesať a začíname s dĺžkou 10/55 celkovej dráhy:

Prepojené oba bloky do jedného ukážkového programu:

Všetko je v jednom projekte, download: zrychlovanie_spomalovanie.zip.
18.10. utorok:
- Tiger sa pustil do pokračovania stavby mechanizmu na odstreľovanie koláčov


- Rak (Matej) aj Krotiteľ pracovali nezávisle na čo najjednoduchšom sledovaní čiary pomocou dvoch senzorov, tu je výsledok ku ktorému obaja nezávisle dospeli:

Download: sleduj_ciaru_s_dvoma_senzormi.zip
Takéto sledovanie čiary ale pri riešení úloh FLL nie je veľmi vhodné - pretože nemáme kontrolu nad tým, v akej polohe robot na konci skončí. Potrebovali by sme také sledovanie čiary, kde sa robot pohybuje po čiare plynule a na konci zastane vždy rovnako. Skúsime sa do toho pustiť!
- Krotiteľ namontoval na základ robota farebné senzory (prvý pokus), napr. na to, aby sa robot mohol zarovnávať na čiernej čiare, ktorá je kolmá na smer pohybu robota:

je však otázne, či by sa tie senzory nemali posunúť o niečo bližšie, alebo pridať ďalšie... skúsime nabudúce?
- Žralok sa celý krúžok snažil spojiť zrýchľovací a spomalovací blok do jedného bloku na opatrný pohyb, ktorý zastane po presne stanovenom počte stupňov a na začiatku pohybu bude postupne zrýchľovať a na konci postupne spomaľovať. Pomocou spätného pohybu obyčajným pohybovým blokom s nízkou rýchlosťou overoval, či vzdialenosť sedí, ale... zatiaľ sa taký blok vytvoriť nepodarilo - takže v tom budeme pokračovať nabudúce.
- Rak sa pokúšal vytvoriť modul, pomocou ktorého by sa dala vziať gorila a doviezť nádoba pod dávkovač s krmivom, ale nie je to jednoduché!

- Vyskúšali sme si tréning na tímovú prácu, bola to dobrá zábava! Každý utorok vyriešime novú tímovú úlohu, aby sme si natrénovali tímovú komunikáciu.

- Panter sľúbil doniesť škrečka na budúci týždeň, to je super! :-)
20.10. štvrtok:
Odstreľovací mechanizmus začal strieľať po úpravách tak silno, že koláče začali lietať až von zo stola na druhej strane. Wow! Tento model bol určite zábavným a veselým cvičením! :-) Veľká výzva zostáva ako tam spoľahlivo pripevniť robota - lebo konštrukcia bude musieť byť pevná a dobre pasovať a robot sa ešte bude možno prestavovať, aby vyhovoval ďalším úlohám a tiež ako spoľahlivo usmerniť vystrelené koláče. Myslím si, že s týmto čiastkovým úspechom, ktorý sme dosiahli sa zatiaľ môžeme uspokojiť a odložiť túto úlohu na neskôr, ak nám zostane čas, tak sa k nej môžeme vrátiť.
Okrem toho Žralok pracoval na novej verzii programu na presný pohyb rovno so zrýchľovaním a spomaľovaním. Odhalil jednu chybu v doterajšom programe, kvôli ktorej výsledná dráha nebola celkom presná a celé to preprogramoval a vytvoril program, ktorý, zdá sa, funguje správne. Budeme potrebovať jeden blok na pohyb vpred, možno aj podobný na pohyb vzad a hádam aj blok, ktorý dokáže takýmto spôsobom zatáčať, nielen chodiť rovno. Ak budeme ale zatáčky robiť pomaly, možno vystačíme aj s týmto.
Download: spomalovanie_zrychlovanie.zip
Rak vytvoril nový model na doručenie krabičky pod dávkovač krmiva a odobratie gorily, ale zdá sa, že to stále nie je to pravé orechové a možno bude treba využiť motor. Treba to vylepšiť, pripojiť na robota a naprogramovať!
Potrebujeme namontovať ďalšie senzory, aby bolo možné jazdiť čo najpresnejšie po čiare.
25.10. utorok:
Strategická porada. Nový model robota, alebo zostávame pri tomto? ---> Zostávame.
Odstrelovací mechanizmus: ešte nevieme, ako presne bude vyzerať na konci robot ---> odkladáme na neskôr.
Dôkladne sme prediskutovali úlohy ---> vznikol nový plán jázd, stránka Jazdy je aktualizovaná.
Potom sme si rozdelili prácu:
- Jakub robí mechaniku pre jazdu 3, už ale čosi máme... Samo na konci krúžku zapracoval a vyzerá to zatiaľ dobre:

- Oli&Oli píšu program pre jazdu 3
- Samo rieši poslednú jazdu
- Maťo sa pustil do dotiahnutia 1. jazdy
- Patrikovi sme nechali náročnú druhú jazdu, vytvorenie programu pre menu, osadenie ďalších 2 senzorov na robota...



Zahrali sme sa ďalšiu tímovú hru so špajlami a páskou. Išlo to dobre, ale skupina sa musí postarať o to, aby sa do spolupráce mohli zapojiť rovnako všetci - viac sledovať kto čo robí.
Samo referoval o svojom nápade na výskumný projekt: škola pre zvieratá. Na Paľovu námietku, že zvieratá sú predsa iné ako ľudia vysvetlil, že má na mysli domáce zvieratá. Rozmýšľali sme ešte trochu, čo tým má na mysli... a pritom sme uvažovali aj nad zorganizovaním kampane, aby ľudia, ktorí majú domáce zvieratko, boli dobre informovaní o tom, čo to zvieratko potrebuje a ako sa k nemu majú správať, lebo sa stále dejú nepekné veci, keď zvieratká kvôli tomu, že ľudia nevedia, čo by mali, trpia... Bola by to vhodná téma na výskumný projekt?